KU Turtle
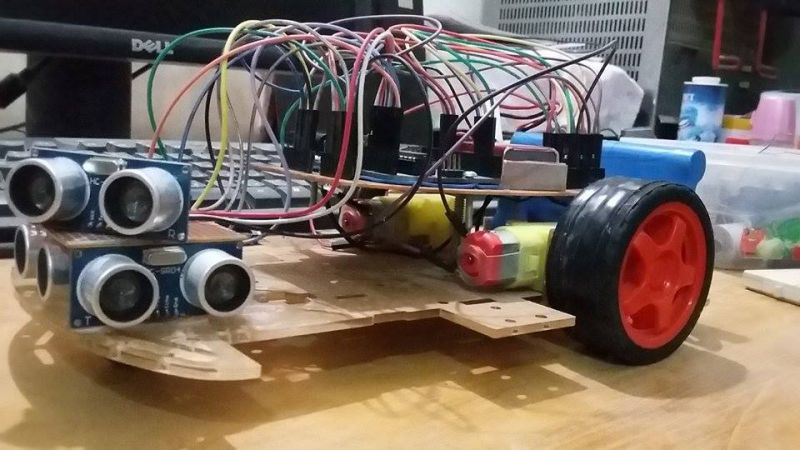
KU Turtle is a line following robot that could also be controlled manually using any Bluetooth devices. KU Turtle represented KURC in Yantra5.0 in the category Yantra Racer. The major electronic components included are: Arduino Uno: A micro-controller based on ATmega328 microprocessor. Lithium Polymer (Li-Po) battery: Used for its high power to weight ratio. DC Geared Motor: A normal brushed DC motor fitted with gears to increase torque in expense of speed. The motors (four), KU Turtle possessed were of 100 rpm, 12 V. L293D motor driver IC: To control the DC motors (Speed and direction). Photodiode Module: A sensor to detect the color black or white (i.e. IR reflecting or absorbing). In our case we used three active photodiode module for more accuracy. Bluetooth Module: The bot was connected to a Bluetooth device via Bluetooth and controlled by an android app. The casing was prepared from aluminium pieces and Polyethylene Terephthalate (PET).
KU turtle is a line following robot prototype whose actual application can be realised.