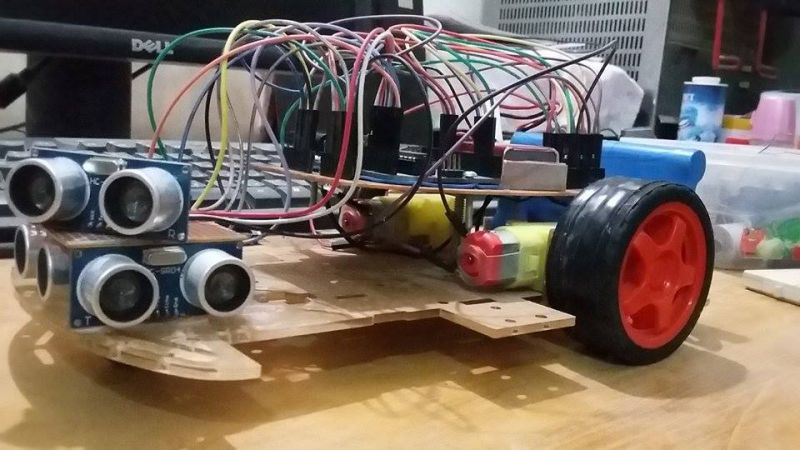
This project builds an autonomous maze solving robot that will learn the arrangement of the maze and navigate the maze. This robot will use an array of infrared sensors (IR sensors) to detect the obstacles and use the Arduino UNO microcontroller to carry out the logical operations and implement the wall following algorithm to solve the non-looped maze. We aim to achieve a fully functioning autonomous maze solving robot which can be expanded on to create similar bots that can be used in medical emergency and delivery sectors.