Amadeus (Piano-bot)
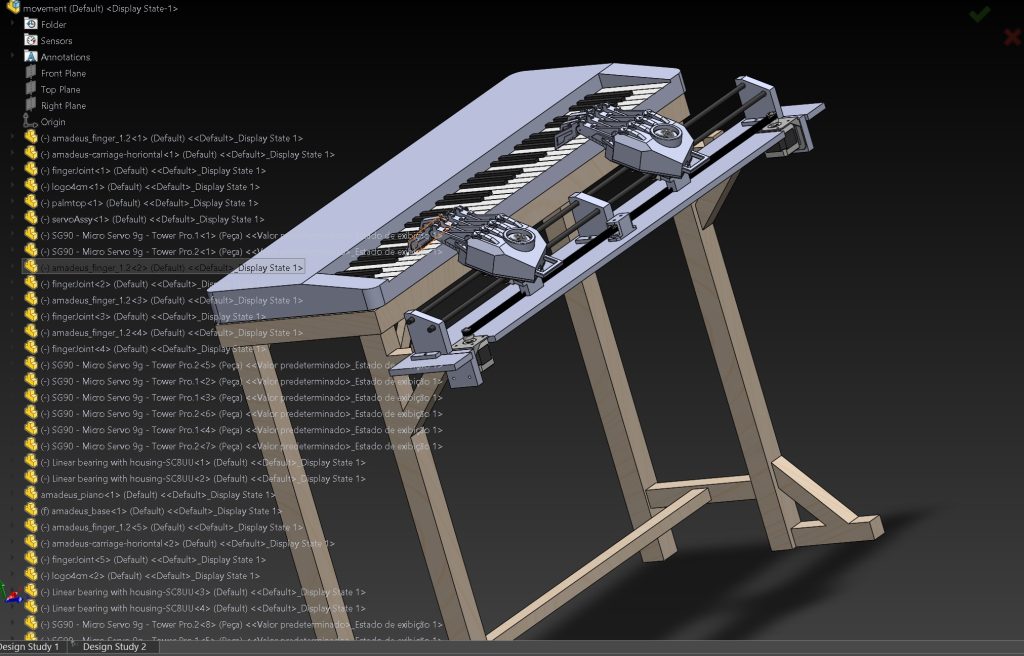
Amadeus: The PianoBot Built from Scratch at KURC Amadeus is an 8-fingered piano-playing robot built by Pranshu Bikram Karki, a Computer Engineering student and KURC’s 11th president, designed to replicate the performance of a human pianist. Each finger is servo-driven, mounted on a carefully designed 3D-printed structure made using the club’s own 3D printer. The design balances precision, strength, and compactness, allowing each finger to press keys accurately and consistently. The robot plays music from MIDI files submitted by users. A Python script processes these files and generates a detailed motor sequence, guiding the fingers on when and where to press. This approach allows Amadeus to handle timing and sequences accurately, making it capable of performing even complex musical pieces. One of the most remarkable aspects of Amadeus is that it was developed entirely from scratch on a limited budget using materials easily available in Nepal. This required creative problem-solving at every stage, from designing the 3D-printed finger assemblies to programming the control system. The project tested both the technical skills and innovation of the team. Project Github Documentaion GitHub – kurc2014/amadeus_pianobot: Official GitHub repository for project Amadeus Amadeus also serves as a learning platform, demonstrating the integration of mechanical design, electronics, and programming in a single project. It highlights how robotics can be applied in creative ways, turning digital music into a tangible performance. Beyond its technical achievements, Amadeus stands as a testament to what can be accomplished with resourcefulness, teamwork, and a hands-on approach to engineering. For more insights and behind-the-scenes details, check out these video interviews and press coverage:
Amadeus (Piano-bot) Read More »