HUSKY : An Automatic Fighting ROBOT
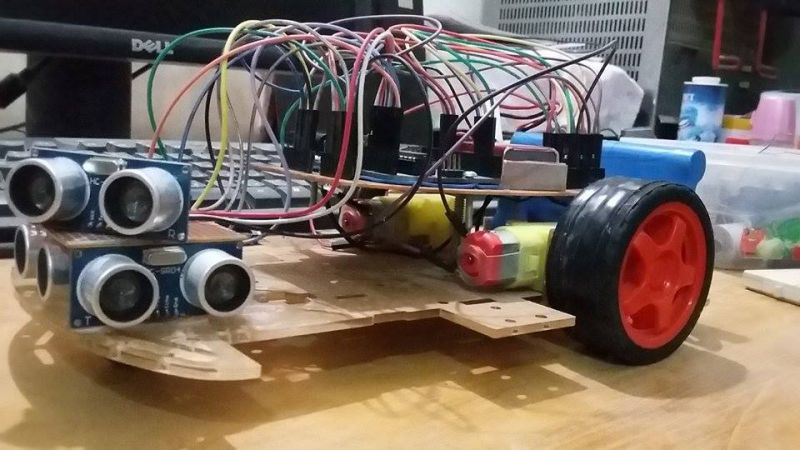
An automatic fighting robot (also known as Sumo bot) is a bot that fights (destructive or non-destructive) and damages or push the opponent bot out of the arena. The bot that fought in our side was named “HUSKY” and it was a non-destructive sumo bot that fought with the opponent bots of the same kind.
The major electrical & electronics components used in “HUSKY” include :
- Arduino Uno R3:- S micro-controller based on ATmega328 microprocessor.
- Lithium Polymer (Li-Po) battery:- Used for its high power to weight ratio with a typical cell voltage of (3-7) Volts.
- Geared DC motor:- A normal brushed DC motor fitted with gears to increase torque in expense of speed. The motors (four), HUSKY possessed were 100 rpm, 12 V.
- L293D motor driver IC:- To control the DC motors.
- Potentiometer:- Which is also called the variable resistor used in Voltage Regulator.
- Photodiode module:- A sensor that detects the colour usually black or white. In our case, we used four Active photodiode modules.
- Ultrasonic sensor:- A sensor that senses the object infront of it. We used two ultrasonic sensors in the front & back sides of the bot which detected the object within 180 degree of rotation.
The casing was made of sheet metal of various guage thickness and weight density to maintain the specified weight limitation of 3 Kg of the bot. Similarly, the specified dimension was 25 cm*25 cm*25 cm and that limit of dimensions and weight was fulfilled.
The bots were needed to fight inside the arena of 2 meter diameter with 5 cm wide black line at the edge of the arena.